

һ��PWM����
PWM��Pulse Width Modulation����������ȵ��ơ�
ռ�ձȣ����������PWM�У��ߵ�ƽ���ֵ�ʱ�����PWM��ʱ�����ڵ�ʱ��֮�ȡ�
����PWMӦ��
���������������������������ģ���·���п��Ƶ�һ�ַdz���Ч�ļ������㷺Ӧ���ڲ�����ͨ�ţ����ʿ�����任����������������ȵ��ƣ�PWM����һ�ֶ�ģ���źŵ�ƽ�������ֱ���ķ�����ͨ���߷ֱ��ʼ�������ʹ�ã�������ռ�ձȱ�����������һ������ģ���źŵĵ�ƽ���б��롣
����Ӧ���У�������ƣ�DAC�����
����S5P6818PWM����
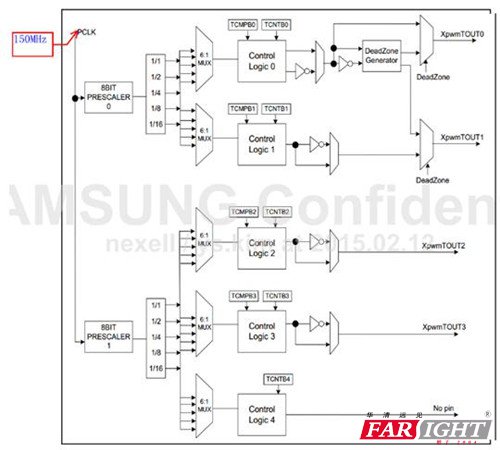
S5P6818��5·32λPWM��ʱ������Щ��ʱ��ΪARM��ϵͳ�ṩ�ⲿ�жϡ����⣬Timers 0,1,2,3,����PWM���ܲ��������ⲿI/O���š�PWM��ʱ��0��һ����ѡ��������������֧������������豸��������Timer4���ⲿ��ʱ��û��������š�
��ʱ��ʹ��APB-PCLK��Ϊʱ��Դ��Timers 0��1����һ��8λ�ɱ�̵�Ԥ��Ƶ����λPCLK�ṩ��һ����Ƶ��Timers 2,3��4��������һ��8λԤ��Ƶ����ÿ����ʱ�����Լ�˽�еĵ�ʱ�ӷ��������ṩһ������ʱ�ӷ�Ƶ����ƵֵΪ1,2,4,8,16����
ÿ����ʱ������һ��32λ�ݼ���������ͨ����ʱ��ʱ���������ݼ���������ʼֵ���ش�TCNTB0�����ݼ�����������0ʱ����ʱ���ж����������֪ͨCPU����ʱ��������ɡ�����ʱ���ݼ�����������0ʱ�����Ӧ��TCNTBn�е�ֵ�Զ����ص��ݼ��������п�ʼ��һ�����ڡ�Ȼ���������ʱ��ֹͣ,����,ͨ�������ʱ��TCONn��ʹ��λ���ڶ�ʱ����������ģʽʱ,TCNTBn�е�ֵ���ڼ��ص���ʱ���С�
PWM����ʹ��TCMPB0�Ĵ�����ֵ����ʱ���������ı������ƽ����ݼ���������ֵ�ͱȽϼĴ�����ֵ��ƥ���ڶ�ʱ������������ˣ��ȽϼĴ�������PWM����ĸߵ͵�ƽʱ�䡣
�ġ�S5P6818��ͼ
�塢S5P6818 PWM���Ʒ�����Ӳ����·ͼ

������ؼĴ�������
TCFG0
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x00h, Reset Value = 0x0000_0101
Name Bit Type Description Reset Value
RSVD [31:24] – Reserved –
DEAD ZONE LENGTH [23:16] RW Dead zone length 8'h0
PRESCALER 1 [15:8] RW Prescaler 1 value for Timer 2, 3 and 4 8'h1
PRESCALER 0 [7:0] RW Prescaler 0 value for timer 0 & 1 8'h1
��ʱ������ʱ��Ƶ�� = PCLK/({prescaler value + 1})/{divider value}
{prescaler value} = 1 to 255
{divider value} = 1, 2, 4, 8, 16
Dead Zone Length = 0 to 254
NOTE: If Dead Zone Length is set as "n", Real Dead Zone Length is "n + 1" (n = 0 to 254). Source clock of PCLK is BUS_DPLL in BLK_MIF
TCFG1
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x04h, Reset Value = 0x0000_0000
Name Bit Type Description Reset Value
DIVIDER MUX2 [11:8] RW Select Mux input for PWM Timer 2
0000 = 1/1
0001 = 1/2
0010 = 1/4
0011 = 1/8
0100 = 1/16
0101 = External TCLK1
0110 = External TCLK1
0111 = External TCLK1 4'h0
TCON
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x08h, Reset Value = 0x0000_0000
Name Bit Type Description Reset Value
TIMER 2 AUTO RELOAD
ON/OFF [15] RW 0 = One
1 = Interval Mode -Shot (Auto-Reload) 1'b0
TIMER 2 OUTPUT
INVERTER ON/OFF [14] RW 0 = Inverter Off
1 = TOUT2 Inverter-On 1'b0
TIMER 2 MANUAL
UPDATE [13] RW 0 = No Operation
1 = Update TCNTB2,TCMPB2 1'b0
TIMER 2 START/STOP [12] RW 0 = Stop
1 = Start Timer 2 1'b0
TCNTB2
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x24h, Reset Value = 0x0000_0000
Name Bit Type Description Reset Value
TIMER 2 COUNT BUFFER [31:0] RW Timer 2 Count Buffer Register 32'h0
TCMPB2
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x28h, Reset Value = 0x0000_0000
Name Bit Type Description Reset Value
TIMER 2 COMPARE BUFFER [31:0] RW Timer 2 Compare Buffer Register 32'h0
TCNTO2
Base Address: 0xC001_8000h (PWM)
Address = Base Address + 0x2Ch, Reset Value = 0x0000_0000
Name Bit Type Description Reset Value
TIMER 2 COUNT OBSERVATION [31:0] R Timer 2 Count Observation Register 32'h0
�ߡ�ʵ�����
�Ĵ������壺
/*
*S5P6818 SFR address define
*farsight
*2017.10.1
*version: 1.0
*/
#ifndef ___S5P6818_PWM_H_
#define ___S5P6818_PWM_H_
#define __REG(x) (*(volatile unsigned int *)(x))
#define uint32 unsigned int
/************* PWM ******************/
typedef struct {
uint32 TCFG0;
uint32 TCFG1;
uint32 TCON;
uint32 TCNTB0;
uint32 TCMPB0;
uint32 TCNTO0;
uint32 TCNTB1;
uint32 TCMPB1;
uint32 TCNTO1;
uint32 TCNTB2;
uint32 TCMPB2;
uint32 TCNTO2;
uint32 TCNTB3;
uint32 TCMPB3;
uint32 TCNTO3;
uint32 TCNTB4;
uint32 TCNTO4;
uint32 TINT_CSTAT;
}pwm;
#define PWM (* (volatile pwm *)0xC0018000)
#endif
ʵ����룺
#include "s5p6818_PWM.h"
void Delay_Ms(unsigned int ms)
{
unsigned int i,j;
for (i = 0; i < ms; i++)
for (j = 0; j < 2500; j++);
}
void PWM_Init(void)
{
//��Դ��������ֱ���÷�������������
#if 0
// 1. ����GPIOC14����ΪGPIO����
GPIOC.ALTFN0 = GPIOC.ALTFN0 & (~(0x3 << 28)) | (0x1 << 28);
// 2. ����GPIOC14�����������
GPIOC.OUTENB = GPIOC.OUTENB | (0x1 << 14);
// 3. ����GPIOC14��������ߵ�ƽ
GPIOC.OUT = GPIOC.OUT | (0x1 << 14);
#else// ��ԭ���������÷����������������仯��ͨ��PWM���ڷ�����������
// 1. ����GPIOC14����ΪPWM����
GPIOC.ALTFN0 = GPIOC.ALTFN0 & (~(0x3 << 28)) | (0x2 << 28);
// 2. ����һ��Ԥ��Ƶֵ������PWM2ͨ��������TCFG0[15:8]λ������Ϊ249 f = 150M / (249+1) = 600000Hz
PWM.TCFG0 = PWM.TCFG0 & (~(0xFF << 8)) | (249 << 8);
// 3. ���ö������Ƶֵ������TCFG1[11:8]λ������Ϊ0100������16��Ƶ f = 600000Hz / 16 = 37500Hz
PWM.TCFG1 = PWM.TCFG1 & (~(0xF << 8)) | (0x4 << 8);
// 4. ����PWM�������ڣ�����TCNTB2�� ����Ϊ100 f = 37500Hz / 100 = 375;
PWM.TCNTB2 = 100;
// 5. ����PWM��ռ�ձȣ�����Ϊ50%�� ����Ϊ50
PWM.TCMPB2 = 50;
// 6. ���ֶ�����
PWM.TCON = PWM.TCON | (0x1 << 13);
// 7. �ر��ֶ�����
PWM.TCON = PWM.TCON & (~(0x1 << 13));
// 8. ���Զ�����
PWM.TCON = PWM.TCON | (0x1 << 15);
// 9. ʹ��PWM��ʱ��
PWM.TCON = PWM.TCON | (0x1 << 12);
#endif
}
int main()
{
printf("*******PWM test*********!\n");
PWM_Init();
while(1)
{
}
return 0;
}
|

�ȵ�����







�����ˣ�Xena

�����ˣ�Scorpio

�����ˣ�Wing
-
 �Ƽ����ܡ�����δ��
�Ƽ����ܡ�����δ��
-
��ע����

 ��ע����Զ��
��ע����ѧԺ
��ע����Զ��
��ע����ѧԺ

 ��ע����Զ��
��ע����ѧԺ
��ע����Զ��
��ע����ѧԺ
 ����
����

 ��ǰλ��:
��ǰλ��:  �߶˿γ�
�߶˿γ�
 ԤԼ��ʦ
ԤԼ��ʦ
 �������
�������



 ȫ����ѯ���ߣ�400-611-6270
ȫ����ѯ���ߣ�400-611-6270